


1前言
从20世纪80年代初开始,我国国民经济迅速而稳步增长,各类工业得到了迅速发展,但各类危险场所的火灾以及由火灾引发的爆炸伤人事故也随之不断发生,已成为现代火灾扑救的一大难题。另外,化学危险品泄漏伴随的毒性、腐蚀性给消防人员的自身安全带来了严重的威胁,在没有对现场进行充分侦检和分析的情况下,盲目地采取行动,不仅不能取得预期的效果,而且往往会造成无辜生命的牺牲,付出惨重的代价。
2消防人员抢险救援时的弊端
目前我国消防部队在灾害现场展开抢险救援战斗时,首先要派侦查人员侦查灾害现场,了解灾害现场情况后方可作出处置决策。由于采用人工侦察手段,必然存在下述问题:
(1)侦察小组(一般由2—3人组成)之间常用通讯绳作为联络手段,相互交流困难;
(2)消防人员在有毒、有害、缺氧、浓烟、放射性等室内外危险灾害现场进行侦察,有可能造成中毒、窒息等事故;
(3)消防人员在易坍塌建筑物、大型仓库堆垛等灾害现场进行侦察,有可能发生坠落或被坍塌物砸中,造成人身伤害事故;
(4)消防人员在进入不明情况的灾害现场时,无法事先确定所佩戴的个人防护装备和侦检设备是否安全合理;
(5)消防人员配备的便携式探测装备数量有限,无法实时定量的探测灾害现场各种数据参数;
(6)消防人员侦察到的现场情况,无法在第一时间向后方指挥员报告;
(7)由于消防人员穿着防护服装、配备防护装备,本身负荷已较重,再要进行如清障、开关阀门、抢救遇难人员等工作具有一定困难;
(8)消防人员受环境影响及个人防护装备的限制,在灾害现场的滞留时间一般小于30min。
因此,研究一种实用的能替代消防救援人员遥控进入有毒、有害(非易燃易爆)、易坍塌建筑物、大型仓库堆垛、缺氧、浓烟、放射性等室内外危险灾害现场进行探测的消防救援机器人,来解决有关消防人员人身安全、时间限制、数据采集量不足和不能实时反馈等问题,是非常紧迫和必须的。
消防救援机器人具有可靠的侦检和救援功能,以及良好的机动性能,对化学、生物、放射性等危险晶的生产、运输、贮存和使用场所的灾害预防,对有毒、有害化学物品泄漏(非易燃易爆)、易坍塌等灾害现场的侦察和处置、易爆物品的搬运,障碍物的清除、遇难人员的抢救等工作起到重要的作用。将能替代消防人员进行现场抢险救援,对灾害现场的灭火、封堵、洗消、破拆等救援作业的展开具有十分重要的作用。
3国外消防救援机器人发展情况
消防救援机器人的研究开发及应用,日本最为领先,其次是美国、英国和俄罗斯等发达国家。国际上对消防救援机器人的研究,在控制技术上可分为三个阶段:第一代是遥控消防救援机器人,第二代是具有感觉功能的计算机辅助遥控消防救援机器人,第三代是自适应智能化消防救援机器人。第一代和部分第二代消防救援机器人已开始服役,但其结构和功能在各个国家都各有特点和独到之处。目前发达国家正在加快开发不同功能的第二代实用型消防救援机器人,而第三代智能型消防救援机器人尚在探索之中,日本、美国和英国已开始进入预研和论证阶段。
4消防救援机器人主要结构
消防救援机器人主要由行走系、机械手、救援拖斗和电液控制系统等结构组成。
4.1行走系
行走系一般分为履带行走系和轮胎行走系两种,本文就履带行走系作一个简单的介绍。履带行走系包括机架、行走装置和悬挂三大部分。
机架是整机的骨架,用来安装所有的总成和部件,使整机成为一个整体。行走装置是用来支撑机体,把发动机的动力传到驱动轮上的驱动扭矩和旋转运动转为消防救援机器人工作与行驶所需的驱动力和前、后运动。悬架是机架和行走装置之间互相传力的连接装置。履带行走装置由履带、驱动轮、支重轮、托轮、引导轮和履带张紧装置等组成,驱动轮通过液压马达驱动,当驱动轮被最终传动二级被动齿轮带动时,其轮齿拉紧履带,地面立即产生了作用在履带上的反作用力,使整机对地面产生前或向后的运动,整机也随之运动。履带行走装置比轮胎的接地面积大,接地比压小。履带所支撑的整机重量都是附着重量,而且在履带的支撑面上大多制有履刺,可增加摩擦力,因此比轮胎式行走装置
的附着牵引性能和通过性能都有所提高,具有良好的越野性能。
4.2机械手
机械手作为消防救援机器人的执行机构,主要起到抓取可疑物,开启阀门,起吊受伤人员的作用。根据人手臂运动的原理以及目前机械手应用的资料,三节臂杆6个自由度的机械手工作装置是最有前途的。
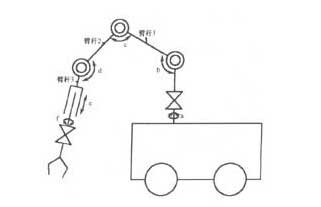
图2
如图2机械手自由度示意图所示,机械手,自由度为本身旋转的自由度,b自由度为臂杆1上下转动的自由度,c自由度指的是臂杆2以臂杆1的纵向轴线为中心转动的自由度,d自由度指的是臂杆3以臂杆2的纵向轴线为中心转动的自由度,e自由度为伸缩臂杆3的平移自由度,f为机械手爪以臂杆3纵向轴线为中心旋转的自由度。
机械手爪需要模拟人手的特征,在抓握的过程中知道获得应有的抓握力。所以考虑在手爪的指或者内部安装触觉传感器。手爪产生的抓握力在垂直方向上产生摩擦力,摩擦力阻止被抓取物由于重力的下落,当手爪与被抓取物之间产生滑动,触觉传感器传送信号使控制系统增加抓握力,直到滑动停止,同时手爪还有弥补滑动位移的措施。
救援机器人需要将受伤人员举起送到救援拖斗上,机械手设计最小的抓举力一般为90kg,采用液压控制技术,机械手运动精度通过液压伺服系统来控制。
4.3救援拖斗
救援拖斗在消防救援机器人中是不可缺少的一部分,它类似于火场救援时使用的担架,在火场中,消防救援机器人利用机械手将受伤人员转移到救援拖斗上,通过电液控制将拖斗移动到机器人机体内,然后消防救援机器人返回后方以便受伤人员得到及时的救助。同时救援拖斗在微小空间内还集成了供气系统,为受伤人员提供新鲜的空气。在救援拖斗的设计中,应该考虑以下方面:
(1)根据担架资料,一般的担架展开后外型尺寸(长*宽*高)为2200mm*550mm*l50mm,考虑
到机器人为违程遥控工作以及受伤人员需移动到机器人机体内,因此救援拖斗的尺寸应该适当的放大,必须保证受伤人员在机体内的宽度和高度,救援拖斗设计时,拖斗尺寸一般为(长*宽*高)2200mm*700mm*300mm左右;
(2)考虑行走过程中救援拖斗的平稳性,消防救援机器人在行进过程中上下颠簸和机器人启动刹车、加速减速产生的震动作用于被受伤人员,给受伤人员特别是骨折病人或外伤病人造成痛苦,并带来种种不安全因素,拖斗必须有一定的减震装置,来减少救援机器人行走时的震动;
(3)救援拖斗的防滑性能,救援拖斗在空间呈一定角度放置,没有安装绑带装置,考虑到有些受伤人员处于昏迷状态,无法控制自己身体的滑移,必须有一定的防滑性能,以确保转送安全。
4.4电液控制系统
消防救援机器人的电液控制系统是由操作人员手持无线发射器发出控制信号给电控系统,电控系统接收到指令后对液压元器件进行控制,实现消防救援机器人的各项功能。
(1)无线遥控及原理
消防救援机器人控制系统采用非交流电动力和先进的无线控制技术,功能强大、体积小巧的可编程序控制技术组成,主要有无线遥控、电控箱等设备。控制系统由无线控制发射器、无线控制接收器、可编程控制器PLC、测速传感器、测温传感器、油门位移传感器及执行机构等设备组成。图3控制系统框图如下:
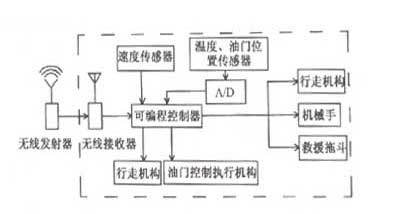
图3
图3中虚线框为电控箱控制功能框图,无线发射器由控制人员手持。无线发射器能发出控制消防救援机器人所具备功能的全部动作信号而且控制半径不大于150m,可使操作者在消防救援机器人后150m远处遥控操作,电控箱中的可编程控制器能接收无线接收器发出的全部控制信号并根据不同的信号执行相应指令,并实时监控消防救援机器人的工况,使执行机构正确的作出相应动作。
(2)液压控制技术
消防救援机器人液压系统一般采用双泵系统。双泵液压系统实际上是两个单泵系统的组合。每台泵各自供给回路中的执行元件。泵的功率是由各自回路所需的功率而定的,这样可以保证复合动作。当系统中只需要进行动作而又要充分利用发动机功率时,可采用合流供油方式,即将两台液压泵的流量同时供给一个执行元件,这样可使执行机构的运动速度提高一倍,该种双泵液压系统在机器人中已被广泛应用。
(3)功率利用和功率分配
消防救援机器人的各执行机构能力是错综复杂的,柴油机后面还有液压泵,液压泵对柴油机功率的利用与传递,将对消防救援机器人的各项能力起决定性的作用,不能单纯由柴油机功率来决定。在执行工况时,液压系统还有发热、压力能以及功能等各种形式的能量损失,功率利用要尽量减少这些损失,并充分利用与传递发动机的有效功率。在功率利用方面,双泵变量系统要优于双泵定量系统,总功率变量系统要优于分功率变量系统。此外,采用合流也是提高功率利用的一个途径。执行机构分组的合理与否,对改善功率利用也是一个重要方面,因为执行元件的分组,将牵涉到双泵之间的功率分配,根据救援机器人在机械手工作中要求机械手爪与小臂同时动作,在小臂提升与回转过程中又要求动臂缸和回转马达同时动作的工作要求,采用两个功率相同的液压泵,分别向两个回路供油的系统。
5结束语
消防救援机器人采用履带行走系,接地面积大、接地比压小,能在恶劣环境条件下进行有效的工作,能实现原地转弯和良好的越野性能。消防救援机器人控制系统采用交流电动力和先进的无线控制技术。整机液压驱动,实现无级调速,具有过负荷保护能力,提高了消防救援器人的使用效果。 (来源:《消防技术与产品信息》 消防天下)



